开发者生态作为技术平台的外延
把无人机变成可编程飞行平台
把无人机变成可编程飞行平台
2014 年 11 月,深圳 DJI 总部的一间会议室里,几位工程师把一段 iOS 代码编译、连接到一台 Phantom 2 的遥控器。遥控器背后的 USB 口连着一台 iPad mini,iPad 上跑的 App 能控制无人机按预设航点自主飞行并记录 GPS 坐标。这段演示后来变成了 DJI Mobile SDK v1.0 的发布版。在那之前,控制一架无人机的飞行路径需要在遥控器上拨动摇杆,或者刷写开源自驾固件。从那之后,任何有 iOS 开发经验的人都可以写一个 App 来接管飞控逻辑。
这个时间点很关键。2014 年的 DJI 正在从航模公司变成消费电子公司。Phantom 2 刚上市,Inspire 1 即将发布,公司年收入从 2013 年的约 1.3 亿美元跃升至约 5 亿美元(市场估计)。但消费级市场再大,DJI 也不可能靠自己的产品部门覆盖电力巡检、农业植保、测绘建模、公共安全这些垂直场景。SDK 不是锦上添花的生态策略,它是 DJI 把自己从"卖无人机"变成"卖飞行平台"的工程手段。
三层 SDK 的扩展逻辑
DJI 在 2014 到 2016 年间陆续发布了三条 SDK 产品线。它们的分工表面上看是"开发者工具",但更接近技术平台复用的核心判断。
Mobile SDK(2014 年 11 月 v1.0,2016 年 1 月 v3.0 大改版)面向移动端应用开发者。它把飞控底层协议封装成 iOS/Android API,开发者不需要懂飞控算法,也不需要嵌入式开发经验,只需要移动端 App 开发能力。MSDK 提供了航点任务、虚拟摇杆、实时图传、相机参数控制等接口。到 2023 年,基于 MSDK 开发的自定义 App 已经超过 1000 个(DJI Enterprise 官方统计)。
Onboard SDK 面向 Linux/ROS 开发者,2015 年随 Matrice 100 发布。它让开发者把一台机载计算机(如 DJI Manifold)直接连接到飞控上,通过串口或 USB 获取高频率遥测数据、发送低延迟飞行控制指令。典型应用是实时处理。例如在飞行中通过机载 AI 模型识别电力线缺陷,即时调整飞行路径,不依赖地面站。OSDK 的扩展性比 MSDK 更深一层:它允许开发者绕过遥控器链路,直接控制飞行器。
Payload SDK 是 2017 年随 Matrice 200 推出的硬件层 SDK。它定义了一套标准接口和物理规格(SkyPort V2 适配器和 X-Port 云台),让第三方公司可以开发挂载在无人机上的专业负载。气体监测仪、倾斜摄影相机、多光谱传感器、探照灯、喊话器都通过 PSDK 与飞控通信,数据实时显示在 DJI Pilot App 或自定义 App 中。到 2023 年,基于 PSDK 开发和量产的第三方负载已经超过 110 种(同一来源)。
这三层 SDK 加在一起,构成一个"API 深度频谱"。MSDK 最浅(封装最高,开发门槛最低),OSDK 最深(接近飞控裸协议,但要求 Linux/ROS 能力),PSDK 在硬件层(需要嵌入式开发加机械设计能力)。三种不同深度的接口,分别接入无人机平台的不同能力层。核心飞控没有变,变的只是外层的接口封装程度。
这里的 DJI 特征在于接口边界。MSDK 不直接开放飞控算法,而是把航点任务、虚拟摇杆、实时图传、相机参数和电池状态封装成移动端 API;OSDK 则把接口推进到机载计算机和飞控之间,让 Linux/ROS 程序能读取遥测并发送控制指令。这样一来,同一台 Matrice 可以同时服务移动 App、机载 AI 和第三方挂载负载,而不把底层飞控安全边界交给外部开发者。
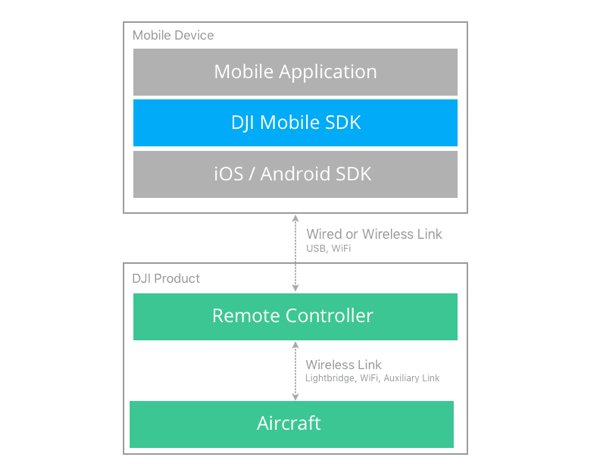 DJI Mobile SDK 架构,展示移动端 App 如何通过遥控器链路与飞行器通信。SDK 负责封装飞控、图传、电池管理等底层逻辑,开发者只需关注业务功能。来源:DJI Developer 官网。
DJI Mobile SDK 架构,展示移动端 App 如何通过遥控器链路与飞行器通信。SDK 负责封装飞控、图传、电池管理等底层逻辑,开发者只需关注业务功能。来源:DJI Developer 官网。
生态中的关键第三方
SDK 的价值最终由第三方应用来证明。2014 年,DJI 推出了第一届 Developer Challenge,面向全球开发者征集基于 SDK 的创新应用。当年来自华南理工大学的 BetterW 团队开发了一款交通事故现场勘察 App,用无人机代替交警手工测量和拍照,获得了首届冠军。2015 年,德州大学达拉斯分校和宾州州立大学的联合团队开发了电力线巡检 App,精准到可以在飞行中识别绝缘子缺陷。到了 2016 年,挑战赛的主题升级为"从行驶的车辆上起飞并自主降落"的搜救任务,合作方包括福特汽车和联合国开发计划署。这些挑战赛的获奖应用虽然在商业上未必直接规模化,但它们验证了 SDK 在垂直场景中的可行性。
测绘和建模是其中最早被验证的垂直场景。
DroneDeploy 是最早的受益者之一。这家总部旧金山的公司成立于 2013 年,2015 年与 DJI 达成技术合作,利用 MSDK 控制 DJI 无人机自动执行航拍测绘任务。核心功能是让用户在地图上框选一块区域,无人机自动生成航点、飞行、拍摄,然后将数据上传云端生成 2D 正射影像和 3D 模型。2016 年,DroneDeploy 推出实时高程建模功能,在飞行中即时查看施工进度。到 2020 年,DroneDeploy 平台管理的无人机测绘面积超过 1 亿英亩,这些数据基本都来自 DJI 无人机。Pix4D 是另一条生态路径。这家瑞士公司本身是专业的摄影测量软件开发商,2013 年之前主要做地面照片的三维重建。2015 年,Pix4D 与 DJI 合作推出 Pix4Dcapture,一款基于 MSDK 开发的免费 App,用于控制 DJI 无人机自动执行测绘航拍。Pix4D 的路线和后处理建模高度匹配:用户用 Pix4Dcapture 采集航拍图像,用 Pix4Dmapper 做专业级三维重建。这套组合在农业、矿业和地质勘探中广泛使用。
Trimble 在 2017 年加入 DJI 生态,角度更偏硬件。Trimble 是全球测绘和定位的行业巨头,以往它在无人机领域的角色是提供高精度 GNSS 定位模块。2017 年,Trimble 与 DJI 合作推出捆绑方案,将 Trimble 的差分定位能力和 DJI 的飞行平台整合,用于高精度测绘和施工监控。这是 PSDK 硬件层面的集成:Trimble 的定位模块作为挂载负载适配 DJI 的 SkyPort 接口。
三家公司的合作路径恰好对应 MSDK、PSDK 和硬件集成三种模式。DJI 不需要自己去理解测绘的坐标系转换原理、农业的多光谱图层叠逻辑、或者施工监控的 BIM(建筑物信息模型)标准。每一个行业的专业知识由该行业的软件公司通过 SDK 接入。这就是技术平台复用的本质:核心资产固定,外围接口可扩展,新场景的适配成本转移到第三方开发者。
FlightHub 2
2021 年 DJI 推出 FlightHub 2,一个基于云的无人机运营管理平台。它标志着 SDK 生态从"控制一架飞机"升级到"管理一支机队"。
FlightHub 2 的核心功能包括:远程实时操作中心(允许地面操作员在千里之外控制无人机)、智能航线规划(用 AI 为巡检任务自动生成最优路径)、数据管理(飞行记录的自动上传、存储和分析)、以及 OpenAPI 接口(让第三方云平台接入 FlightHub 2 的核心功能)。到 2023 年,自 2022 年 3 月 Cloud API 发布以来,超过 750 个开发者已经基于它构建了云平台(DJI Enterprise SDK Guide)。
FlightHub 2 让 DJI 的开发者生态从"三层的深度频谱"延伸到第四层,云平台层。开发者不再需要在机载计算机上写实时处理代码,也不需要写移动端 App 来控制飞行路径。他们可以在云端用 RESTful API 管理整个机队的飞行任务、数据分析和工作流编排。DJI 的飞控、图传和云台技术从嵌入式系统一路开放到了云端 API。
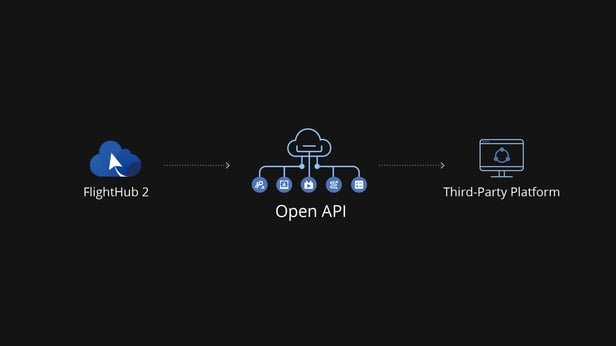 DJI FlightHub 2 OpenAPI 架构:将核心功能封装为 RESTful API,允许第三方云平台接入航线管理、直播转发、设备同步等功能。来源:DJI Enterprise Blog。
DJI FlightHub 2 OpenAPI 架构:将核心功能封装为 RESTful API,允许第三方云平台接入航线管理、直播转发、设备同步等功能。来源:DJI Enterprise Blog。
SDK 生态的规模与边界
截至 2023 年,DJI 官方披露的 SDK 生态关键数字包括:超过 10 万名开发者注册加入 DJI 开发者计划,1000 多个基于 MSDK 开发的自定义 App,超过 110 种基于 PSDK 开发并量产的第三方负载,以及 750 多名在 Cloud API 之上构建云平台的开发者。这些数字放在消费电子行业不算突出(相比 iOS 或 Android 的数百万开发者),但考虑到无人机行业是一个极其垂直的品类,10 万开发者的覆盖面已经覆盖了几乎所有可以规模化的行业场景。
从成本结构视角看,SDK 生态改变了 DJI 的研发投入分布。DJI 不需要在自己内部养一支懂测绘、懂农业、懂消防的行业专家团队,而是通过 SDK 接口让每个行业的现有软件公司自行适配。每一条 MSDK 授权应用、每一个 PSDK 挂载负载,都是行业知识进入 DJI 平台的入口,但开发成本由第三方承担。
这个模式也有内在约束。DroneDeploy 和 Pix4D 同时适配多家无人机品牌的飞行器,对它们来说 DJI 只是"可替换的硬件供应商"之一。SDK 接口越开放,开发者的切换成本越低,这是一个微妙的平衡。DJI 的应对方式是把接口封装深度和技术支持质量做成壁垒。MSDK 的 API 稳定性和文档完整度,在无人机行业中长期没有竞品做到同等水平。
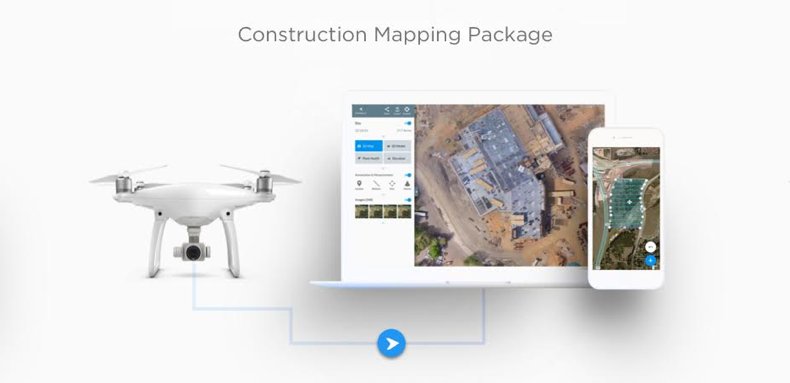 DJI 无人机通过 DroneDeploy 平台执行建筑工地测绘的示意场景。第三方软件通过 MSDK 控制无人机,DJI 不需要自己开发测绘软件。来源:DJI 官网新闻。
DJI 无人机通过 DroneDeploy 平台执行建筑工地测绘的示意场景。第三方软件通过 MSDK 控制无人机,DJI 不需要自己开发测绘软件。来源:DJI 官网新闻。
追问
如果 2014 年 DJI 没有发布 SDK,而是选择自己开发行业应用软件,今天的企业级市场格局会有什么不同?Matrice 系列是否还能占据同样的市场地位?
三层 SDK 的接口深度(MSDK 最浅、OSDK 最深、PSDK 在硬件层)覆盖了几乎所有行业场景,但这种分层设计在 API 演进中也有成本。多平台(iOS/Android/Linux/ROS)的同步更新、版本兼容性维护,DJI 在这个问题上的取舍说明了什么?
10 万开发者对垂直品类是否足够?当无人机行业进入平台期后,开发者生态的规模和活跃度是否会影响 DJI 在行业解决方案中的议价权?
DroneDeploy 和 Pix4D 同时支持 DJI 和 Autel 等其他品牌无人机。DJI 的 SDK 开放策略让这些平台获益,但反过来也让 DJI 变成"可替换的飞行硬件"。当第三方平台同时适配多个无人机品牌时,DJI 靠什么维持平台粘性?